研究詳細
RESEARCH

Research and Industry-Academia Collaboration
研究?産学連携
神経形態 AI 回路とシステム
概要
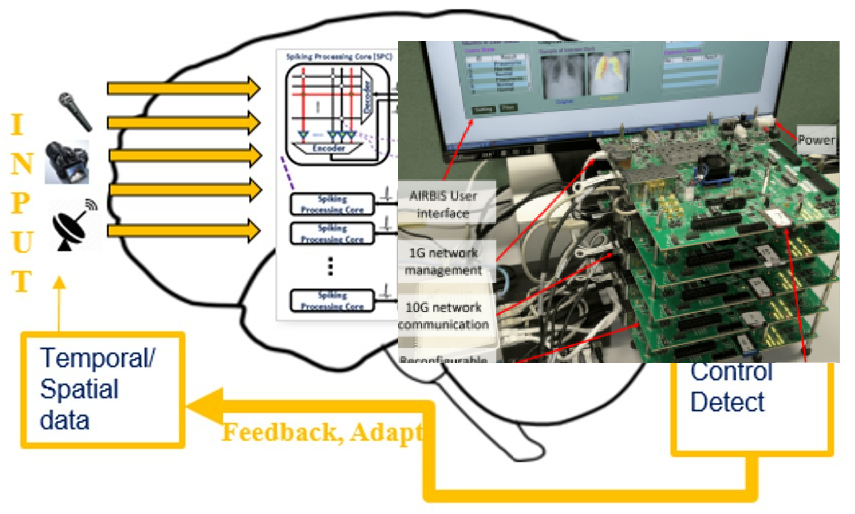
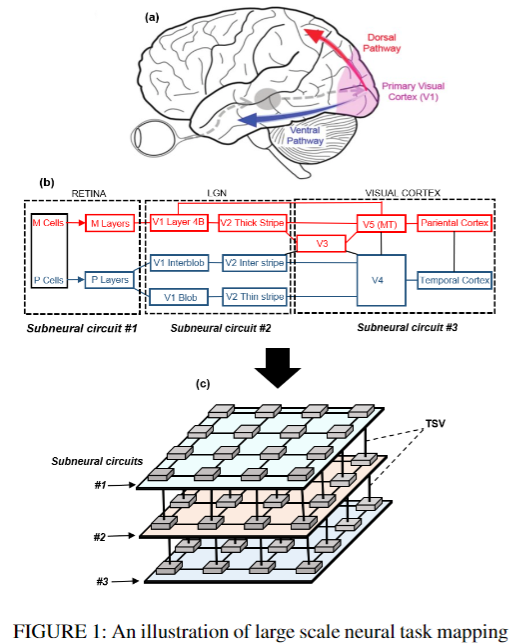
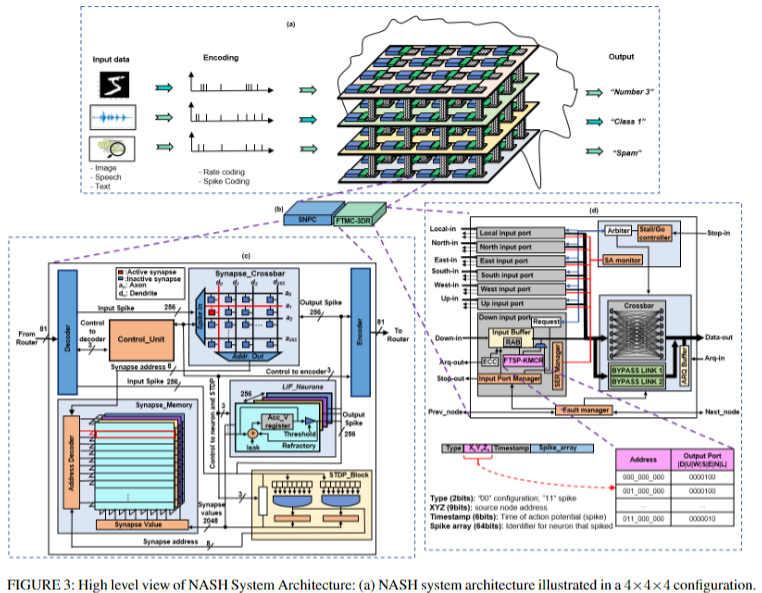
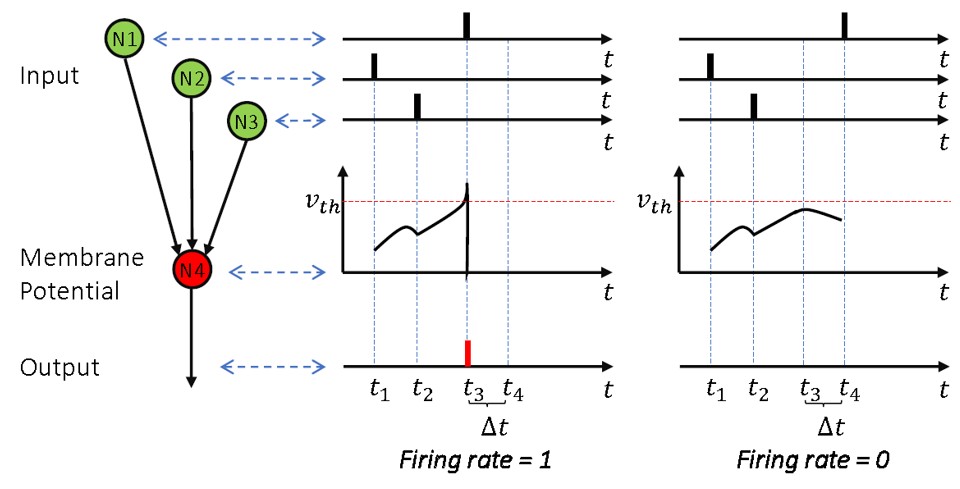
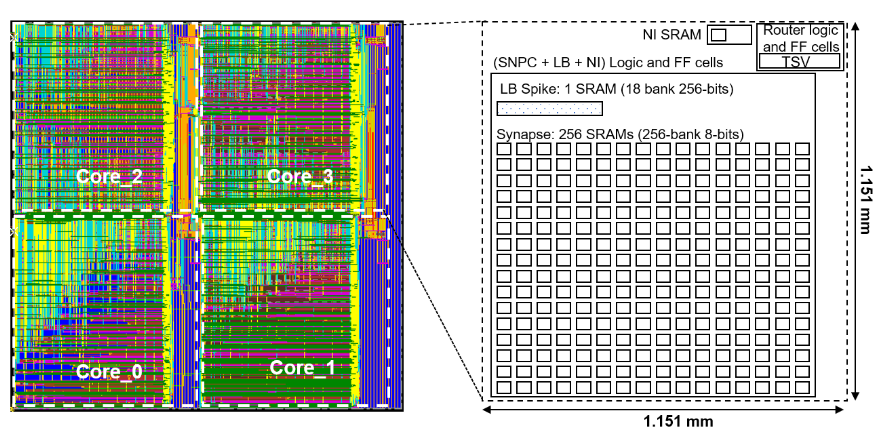
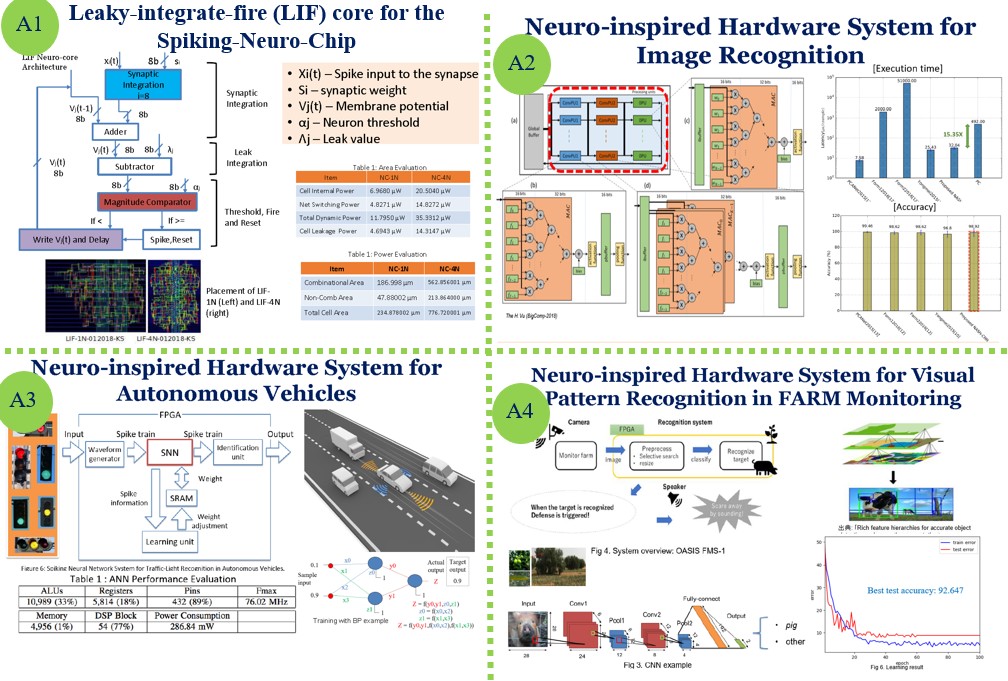
私たちは、以前開発した耐障害性のある三次元オンチップインターコネクト技術を強化した、適応型超低電力ニューロモルフィックチップ (NASH) およびシステムの開発を進めています。NASHシステムは、スパイクの重み、ルーティング、隠れ層、トポロジーなどのさまざまなSNNパラメーターの再構成を可能にする効率的な適応構成方法を備えていることを特徴としています。さらに、このシステムは、さまざまなディープニューラルネットワークトポロジーの混合、効率的な耐障害性マルチキャストスパイクルーティングアルゴリズム、および効果的なオンチップ学習メカニズムを組み込んでいます。NASHシステムのパフォーマンスを実証するために、FPGA実装を開発し、VLSI実装も確立します。NASHの最終目標は、脳にインスパイアされた処理技術を小規模な埋め込み型センサーやセンサーベースのデバイス(BCI(EEG/EMG)、オーディオ、プレゼンス検出、アクティビティ認識など)に導入することです。
...read more