教員詳細
FACULTY

Research and Industry-Academia Collaboration
研究?産学連携
山田 竜平 YAMADA Ryuhei
准教授
教育
- 担当科目 - 大学
- 担当科目 - 大学院
研究
- 研究分野
-
宇宙惑星科学
知能ロボティクス
地球物理学、月惑星探査、ロボティクス
- 略歴
- 2020.4-現在 腾博会游戏大厅_腾博会国际娱乐-下载|官网 復興支援センター(福島ロボットテストフィールド腾博会游戏大厅_腾博会国际娱乐-下载|官网オフィス所属) 准教授 (併任: ARC-Robot, CAIST)
2016.11-2020.3 腾博会游戏大厅_腾博会国际娱乐-下载|官网 復興支援センター 特任准教授
2011.10-2016.10 国立天文台 RISE月惑星探査検討室 プロジェクト研究員
2010.6-2011.9 宇宙航空研究開発機構 科学衛星運用?データ利用ユニット 任期付き職員
2009.4-2010.4 トゥールズ第3大学 ミディピレネー研究所 研究所
2009.3 東京大学大学院理学系研究科 地球惑星科学専攻 博士後期課程修了 (理学博士)
- 現在の研究課題
- 月惑星内部構造?表面探査、惑星地震学、極限環境に適用可能な観測機器開発、3次元環境復元、災害現場や極限環境域におけるロボットの自律移動
- 研究内容キーワード
- 所属学会
主な研究
- 月火星箱庭構想
-
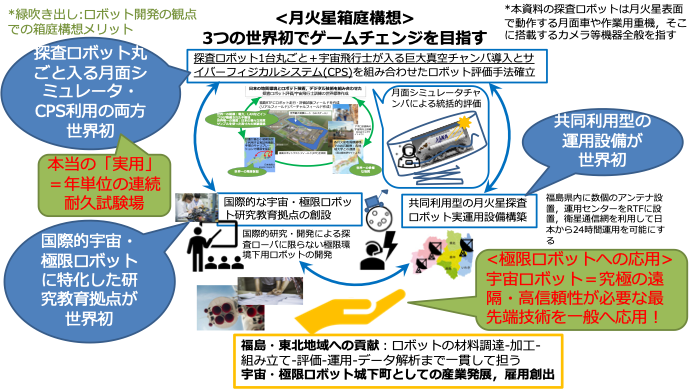
月火星箱庭構想で作成を目指すロボット評価施設は,大きく3つ.1つはリアル&バーチャル箱庭(ロボット走行路&リアル空間を再現したシミュレータ内の走行路),2つ目は月火星表面を模擬可能なシミュレータチャンバ(低圧環境,表面土壌等を模擬),3つ目は共同利用可能な月火星探査ロボット運用設備(アンテナ等).